潜艇作战篇
一、潜艇机动
1.1 航速
潜艇大多数时间都是在水下进行巡航,通常核潜艇的航行速度(巡航)比柴电潜艇要快,这也说明核潜艇在相对大片的海域中执行作战任务时,具有更好的机动性,能够在相对有限的任务时间内进行机动。而柴电潜艇由于航速较慢,进入预定攻击阵位和拦截敌方舰船的难度就会相对增加,因此合理的选择航速,对潜艇作战来说比较重要。
问题1 :如何选择不同类型的航速?
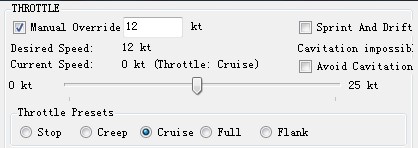
图1 航速选择(上:航速选择标尺,下:快速模式选择)
因为潜艇作战对隐蔽性有较高的要求,再加上水下环境的影响,所以潜艇在正常机动时通常不会加足马力前进。当位于浅海深度(Shallow)巡航时,采用5 节 左右的慢速(Creep)有利于被动声呐获取水面舰艇的信息,超过12-15 节 的航速容易发生空泡效应(Cavitation)造成潜艇位置的暴露。
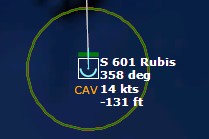
图2 空泡现象(出现CAV 字样)
柴电潜艇在充电时,航行速度越慢充电效果越好;核潜艇位于深海时,可以相应的提高航行速度至15-20节左右,而不至于担心发生空泡效应。因此要根据潜艇所在的深度、任务要求、隐秘性等条件合理的选择航行速度。
冲刺与漂流(Sprint and Drift ) :如果潜艇长期使用缓慢的速度前进,会大大降低潜艇的机动性,因此可以采用“冲刺与漂流”的操作,让潜艇在快慢速度之间交替切换。慢速前进时进行搜索,然后突然快速前进至下一个阵位后再次减速搜索,能够保证潜艇巡航的前提下,对前方海域的情况有所了解。
不依赖空气推进( Air Independent Propulsion ) :AIP技术为常规潜艇提供了柴油机和电池之外的另一种动力可能。使得常规潜艇能够在水下较长时间的运动,并利用其静音的特点,在特定航路上进行伏击。但AIP推进条件下潜艇无法达到较大的航速。
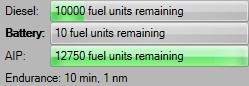
图3 AIP 推进模式
建议: 在非作战区域或不太可能出现敌方潜艇采用巡航(Cruise)模式,而在作战区域采用慢速(Creep)模式,全速(Flank)模式主要用于潜艇暴露后的规避机动。另外,潜艇静止(Stop)在海底(坐底),等待合适的时机上浮攻击也是一个不错的做法。当潜艇在温跃层下方静止时,有助于发挥潜艇的监听效果,来寻找可能的敌方潜艇。
问题2 :如何机动拦截敌方水面船舶?
潜艇相对于船只往往航速较慢,因此需要仔细的规划航行路线,以便在适当的位置和目标相遇。在拦截之前,需要通过其他手段确认目标大致准确的航向与航速,并假设目标维持当前航向与航速不变的情况下,利用作图法找到能够拦截的位置。
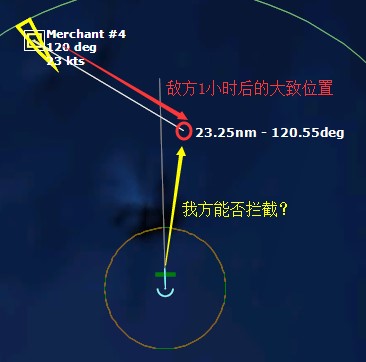
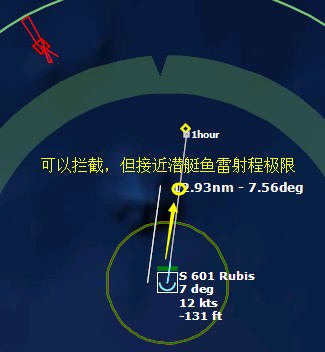
图4 拦截方案示例
如果潜艇位于拦截目标的后方,一般是无法有效拦截。判断拦截点可以通过目标航速进行判断,例如当前目标以23节航速机动,就代表一个小时后目标会前进23海里,找到目标一小时之后的位置后,建议先使用快捷键(Ctrl+Ins )标注参考点,再使用测距工具(**快捷键:**Ctrl+D ),测量该点与潜艇的距离,如果也位于潜艇的一小时航行范围之内,说明能够拦截,如果潜艇以当前航速无法抵达目标点,则应当将目标点沿着航向再延伸23海里,再次判断能否拦截。出于进攻的目的,潜艇尽量在目标抵达之前1小时就能够进入攻击阵位进行隐蔽,有利于达到更好的攻击效果。
上图的例子中,我方潜艇航行1小时后,距离敌方舰船还有一段距离,但此时已经处于鱼雷的射程之内,对于慢速航行的舰船已经可以实施攻击。但如果是速度更快更灵活的军舰,则建议在2小时的交汇点考虑进行伏击。并且时刻留意舰艇的动向,注意保持隐秘。
1.2 潜深
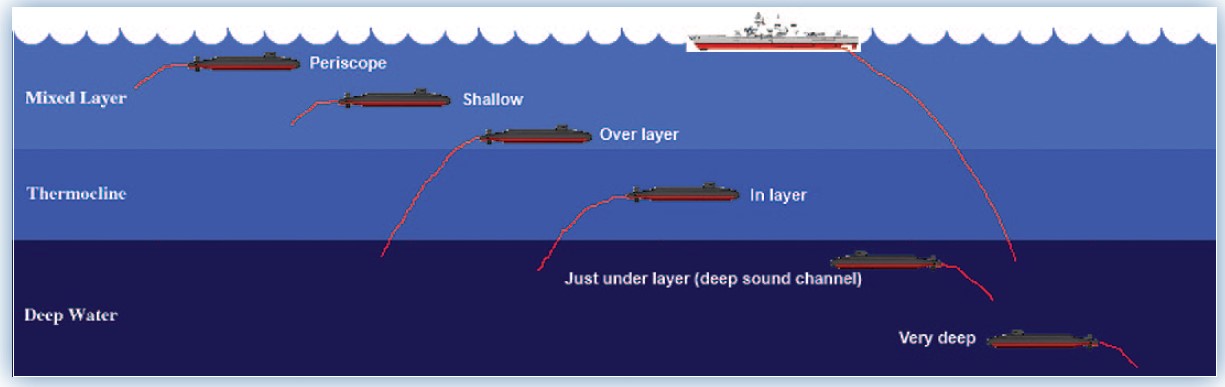
图5 潜艇所在的各种深度(红线代表潜艇的拖曳声呐)
潜艇下潜的深度分为水面(Surface),潜望镜深度(Periscope depth),浅海深度(Shallow depth),温跃层之上(Just over layer),温跃层之内(In layer),温跃层之下(Just under layer),极限潜深(As deep as possible)。当然也可以手动调节深度至任何数值。
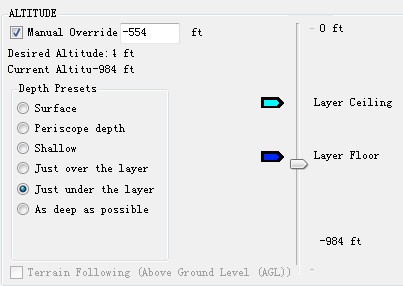
图6 深度选择(左:快速选择,右:深度标尺)
水面(Surface ) :一般情况下,潜艇都不会采取水面航行的状态。即使柴电潜艇也能够通过在水下使用通气管以便让柴油机工作而无需上浮。需要注意的是在极地区域,因为水面上有冰层,所以并不是所有潜艇都能浮到水面的。
潜望镜深度(Periscope depth ) :潜艇只有在这个深度才能够使用包括潜望镜、电子支援装置、雷达等传感器探测水面以上的目标。另外,一些潜射武器的发射也需要在这个深度附近执行。在有些剧本中(DLC- 沉默快递 ),潜艇需要保持在此深度,才能够激活特殊行动事件,例如获取卫星传来的资料等。
浅海深度(Shallow ) :一些潜射武器能够在此深度发射,同时潜艇在这个深度也能够探知水面船只的信号,但相对于潜望镜深度而言信号强度更加微弱。保持在这个深度的潜艇具有更好的灵活性,一方面保持对水面的监控,另一方面也能够快速下潜到温跃层之下。
温跃层之上(Just over layer ) :潜艇在此深度的主要目的是猎杀其他潜艇。保持在温跃层之上,可以利用艇壳声呐和拖曳声呐来最大化水下探测能力。但是在这个深度,很容易出现空泡效应,导弹也无法在这个深度以下发射。
温跃层之内(In layer ) :潜艇在温跃层内部,就像飞机在云中飞行一般,其他船只难以探测潜艇,反过来潜艇除了利用拖曳声呐之外,也难以探测其他目标。温跃层的厚度会根据不同海域有所不同。要想让潜艇保持在温跃层中,需要手动选择深度,并注意不同区域的温跃层变化。此外,温跃层的强度也会影响传感器的工作。相关信息能够在如下图所示的鼠标悬浮信息栏里查看(建议将此信息栏固定于窗口左下角)。
![]()
图7 温跃层厚度在-305 英尺至-522 英尺变化,强度0.51
温跃层之下(Just under layer ) :在这个深度内声音传播距离非常远,因此VDS(可变深度声呐)、拖曳声呐、浮标和吊放式声呐都主要针对这个深度进行工作。潜艇在这个深度的机动很容易被发现。
极限潜深(As deep as possible ) :潜艇在这个深度即使高速航行也不容易发生空泡。另外,在浅海地区的海底能够为静止于此深度的潜艇提供天然的庇护,来应对敌方主动声呐对海底的扫描。潜艇非常适合利用此深度进行机动,或者在浅海区域坐底埋伏等待攻击时机。
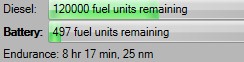
图8 柴电潜艇的充电
关于柴电潜艇的充电 :当深度达到潜望镜附近时,潜艇能够自动升起通气管(Snorkel),使用柴油机动力为电池充电。当深度增加后,就会自动切换成电力。充电等相关设定可以在条令中进行设定。柴电潜艇相对于核潜艇来说,静音效果相对更好一些。但充电期间,使用噪音较大的柴油机以及位于潜望镜深度,对潜艇的安全来说是一种威胁。
二、潜艇传感器
2.1 传感器概述
传感器是潜艇重要的眼睛和耳朵,航行在水面以下的潜艇要想获知周围的情况,就需要借助各类先进的传感器。传感器主要通过目视、电磁波、声波等形式感知周围动态。下图是美国先进的海狼级(Seawolf SSN-21)核潜艇上携带的主要传感器。其中包括AN/BPS-16中距离搜索雷达,AN/BLQ-10(V)3电子情报收集与定位装置,AN/BQG-5A WAA[BSY-2]被动式艇壳声呐阵列,AN/BQQ-10[ARCI(V)S]主被动艇壳声呐,AN/BQS-24 MIDAS主动冰下导航和避障艇壳声呐,AN/TB-29与AN/TB-34被动拖曳声呐阵列(TASS),AN/WLR-9B水声监控与鱼雷告警装置,以及目视观察等传感器。需要注意的是,各类传感器的搜索范围是不同的,一般电子支援装置的接收范围最远,其次是雷达和被动式声呐等。另外,传感器的年代较新的一般功能要比早期的效果会更好。
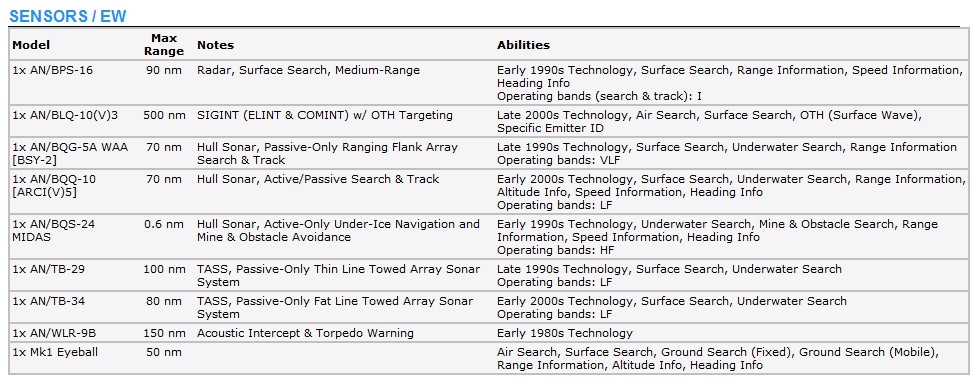
图9 SSN-21 Seawolf 的传感器
2.2 传感器功能
潜望镜 :当潜艇位于潜望镜深度时,会自动开启潜望镜,通过目视进行搜寻。开启潜望镜要冒着被敌方发现的风险。另外目视的效果还会受到时间、天气和海况的影响。因此开启潜望镜并不是较好的搜索方式。
电子支援(ESM ) :该设备的主要功能是被动接受相对较远距离的各类电磁信号,然后以此来比对识别对应的目标类型,使用电子支援装置也会有几率暴露己方的存在。而且尽管ESM设备能够进行大致的目标方位定向,但具体的位置测定还是比较模糊的。而且对于未在范围之内(受地球表面曲率影响,有些雷达的电磁波在较远的距离接收不到)或者无线电静默的目标也无法识别。
雷达 :需要通过手动开启,但肯定会暴露潜艇的存在,因此一般也不会使用。
主被动声呐 :这是潜艇上最主要的传感器,能够通过监听水下的各类声音,识别目标的类型、航向、速度等。通常使用最多的是被动式声呐,能对潜艇前方与侧方的声音进行收集。而位于潜艇后方的区域,由于推进器噪音的影响,往往是声呐的盲区。因此潜艇作战与飞机狗斗类似,位于对方6点钟方向能够更好的隐蔽自己,同时在未被发现的情况下实施跟踪或者攻击。主动式声呐一般在紧急情况下会开启,用来精确定位敌方潜艇的位置。当然是用主动式声呐也必然会暴露自己的位置。因此不到千钧一发之时,是不会随便开启主动式声呐的。另外,己方潜艇航行速度越慢,对声呐造成的干扰也就越小,监听效果也就越好。反之,高速前进的潜艇自身的探知能力也会下降。
拖曳声呐 :潜艇位于温跃层上方时,能够对浅层海域内的情况进行监听,而温跃层之下的水域监听就要靠潜艇携带的拖曳声呐。利用拖曳声呐能够扩大潜艇的搜索范围,同时温跃层下方的敌方潜艇却难以感知到温跃层之上的己方潜艇。
2.3 汇聚区
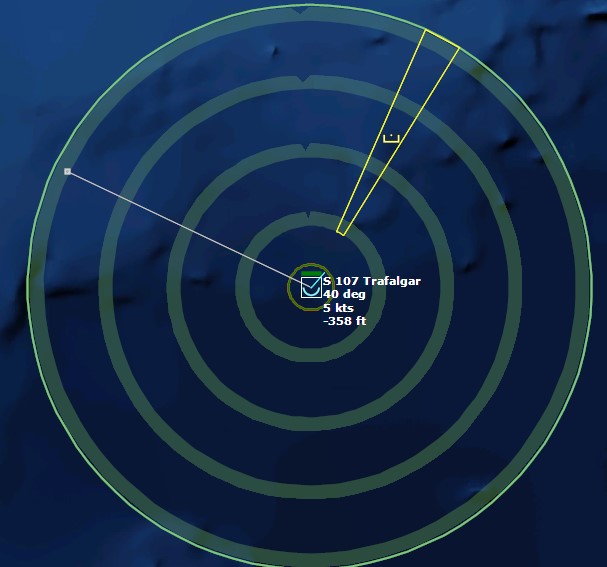
图10 汇聚区
声音在海洋中的传播受到各种因素的影响,其中温度随着水深的变化形成了温跃层。温跃层一般在100-300英尺附近改变,其强度随着海底深度和季节等因素而不同。最重要的是,水温的急剧变化使得声波在跃变层被反射回去,从而降低了温跃层下方潜艇被探知的概率
随着海水中水压随着深度的增加,音速和物质密度成正比,压强的增加使得音速不断升高。当声音向下传播时,会被慢慢的向水面方向折射成弧线,在若干英里之外重新到达水面,然后继续向下反射。这一现象被称作“汇聚区”。汇聚区大约每隔33 海里 折射到海面,形成以声源为中心的同心圆环(如图10所示)。利用汇聚区能使得潜艇侦测到更远的探测距离内的信号,但是该信号可能位于汇聚区中任意一个圆环内。且在浅海区域很难形成汇聚区。
作战TIPS :要想确定汇聚区信号的具体位置,可以采取如下行动:当发现一个汇聚区信号时,立即将潜艇进行3、9点机动,保持航向与汇聚区目标信号垂直,前进一段时间后信号应该会离开汇聚区从而丢失,这时候潜艇立即恢复目标航向,快速接近(33海里),直到再次接收到汇聚区信号,然后重复此操作,就能够将目标保持在己方的汇聚区内,或者迅速接近目标。
2.4 潜艇隐秘性
关于潜艇自身的噪音 :通常柴电潜艇相对于核潜艇其静音效果会更好,这是因为电动机的振动相对于持续工作的核反应堆,引起的振动要更小。因此柴电潜艇更适合于在狭窄航道静止坐底等待伏击的机会。而核潜艇的噪音则会在不同的频率段有所不同。下图为海狼级核潜艇所发射的信号,可以看到在低频段(低频声音在海洋中传播的很远)潜艇的噪音大约为95-97分贝。而世界上其他国家的核潜艇的噪音有可能会达到140分贝以上。所以说海狼级核潜艇是世界上静音性最好的潜艇也不为过。噪音较大的核潜艇在海洋中就像开着凤凰传奇的音乐跳着广场舞一般引人注意。另外,因为潜艇自身形状的原因,其侧面在主动声呐下非常容易暴露。从下图中,还会注意到潜艇被目视发现和识别,以及红外与雷达探测的距离。所以尽量不要让潜艇上浮到海面附近以免暴露。
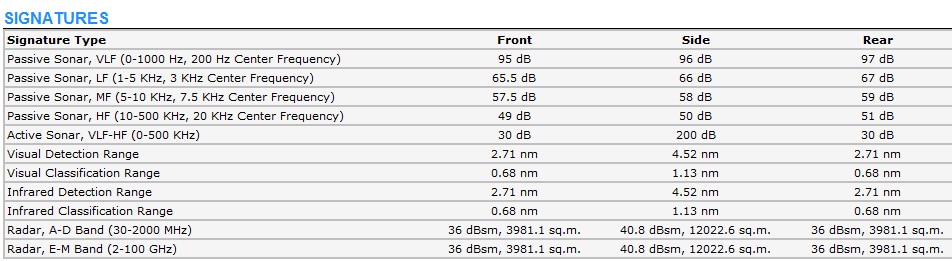
图11 海狼级核潜艇的信号
利用浅海和海底掩护 :浅海区域有大量的生物活动和民用船舶航行,因此在这个区域内海洋里的声音就像集市中的敲锣打鼓一般,潜艇的声音能够很好的隐蔽在环境的噪音中。所以尽管浅海区域不利于潜艇的机动,但另一方面也不利于反潜。此外,浅海区域的海底深度会小于潜艇的极限潜深,潜艇可以利用海底对声波的反射效果来隐藏自己的踪迹。
声呐遮盖效应(Sonar masking ) :海洋中航行的船舶能够发出很大的噪音,会对声呐的探测造成干扰。例如A与B两艘潜艇之间有一艘大型商船,则两艘潜艇都很难在噪音中听到对方的信号。但是如果商船位于A与B的连线一侧,则距离商船较近的B潜艇能够清晰地听到A潜艇的信号,因为A的声音没有被掩盖。而A潜艇却很难听到B潜艇的信号,因为B潜艇后方有巨大的噪声源。这个例子说明声呐的遮盖效应对方向非常敏感。合理的利用这个效应进行机动,就好像空战中利用阳光来发起进攻一样。
三、潜艇武器
3.1 武器概述
现代潜艇能够携带多样的武器装备来执行作战任务。这其中包括传统的鱼雷,潜射巡航导弹,潜射反舰与防空导弹,诱饵等。下图为海狼级核潜艇的武器装备。其中武器的发射需要对应的装备,主要有8个762mm的发射管,能够发射战斧巡航导弹或者鱼雷。此外,一些战略核潜艇还具备垂直发射的装置。在发射各类武器之前,需要将对应的武器装入发射管中。因此,合理的选择武器对于作战影响很大。
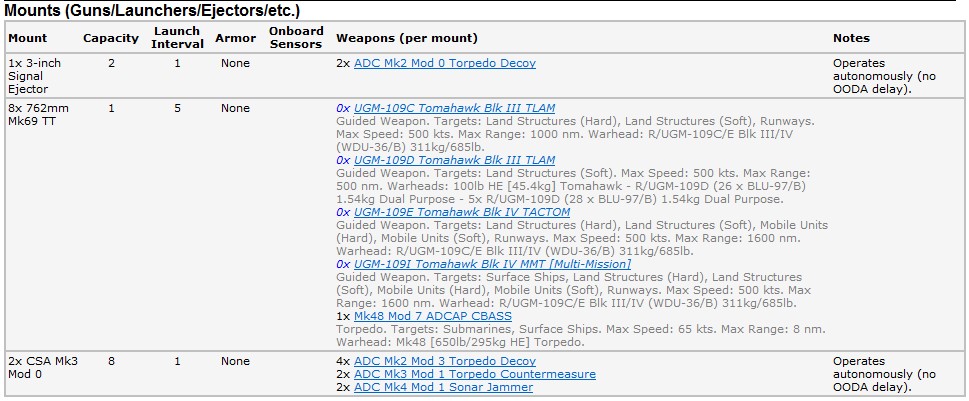
图12 海狼级核潜艇的武器装备
3.2 鱼雷
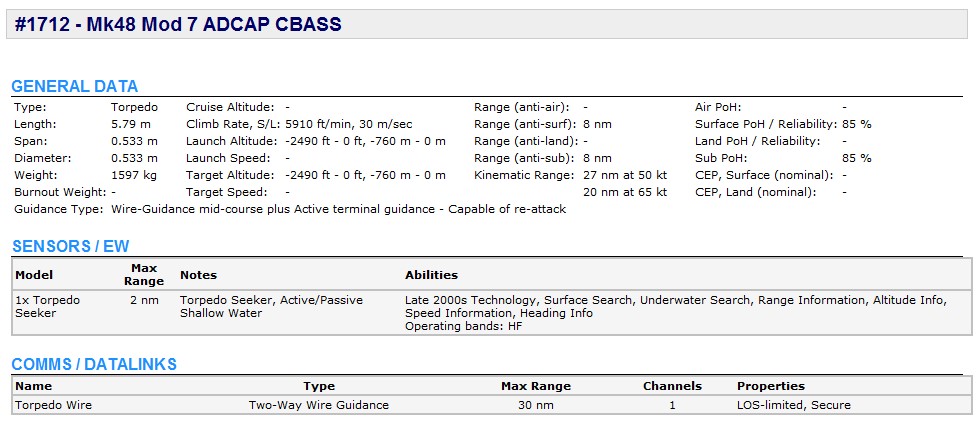
图13 鱼雷性能参数
鱼雷是潜艇最经典,也是最好的攻击武器。现代化的鱼雷能够在更深的海洋中发射,并且通过线控的方式进行引导,具备了重复攻击的能力。
上图是Mk48 Mod 7 ADCAP CBASS鱼雷的参数,从相关数据中可以得知鱼雷的发射深度达到了-2490英尺,有效的攻击范围大约8海里,能够以50节的速度航行27海里或者以65节的速度航行20海里,命中率85%。鱼雷拥有主动引导能力,能够主动探知2海里范围内的目标。
关于线控引导(Wire-guided ) :线控鱼雷发射后,在潜艇上就会出现wire字样。此时,可以用快捷键F3改变鱼雷的航向,F2改变鱼雷的深度。做到对鱼雷的完全可控。但是如果己方潜艇的航行速度过快或者剧烈转向,就会拉断导线。之后鱼雷就会失去线控模式,采用既有航向配合自身的引导头搜寻目标。因此为了最大化潜艇鱼雷的作战效果,面对敌方潜艇时尽量抢先射击,这样即使敌方潜艇发出鱼雷也将会因为采取规避机动而失去对鱼雷的引导。
鱼雷在发射时,尽量采用齐射的方式,确保一次击沉目标。因为线控鱼雷会占用发射管,因此只有当鱼雷脱离控制后,才能再次进行新一轮齐射。
3.3 潜射导弹
潜艇能够携带一定数量的各类导弹,例如战斧巡航导弹、反舰导弹和防空导弹等。有些潜艇发射导弹需要占用鱼雷发射管,所以要想在合适的时机使用这类武器,最好在发射前手动更换发射管内的武器,避免重新装填造成丧失时机。
更换武器装备,可以在右侧侧边栏的Weapon按钮上点击,就会出现下图的窗口。可以看到潜艇有数个发射管,分别能够装填SS-N-27,SS-N-30和USGT三种武器。在右边的Reload Priority栏目内打钩,则会尽快更换该类型的武器,并提示装填时间。当装填时间结束后,就可以发射了。
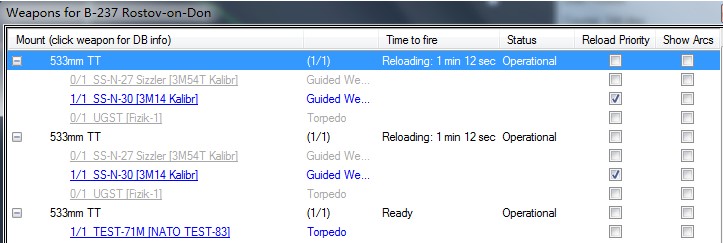
图14 更换武器装备
巡航导弹在攻击时,建议手动选择攻击目标,并利用plot course来设置巡航路径,避开敌方的防空火力网。
3.4 诱饵

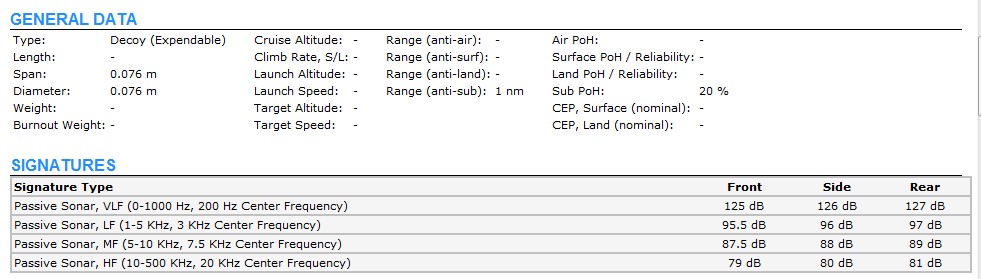
图15 ADC Mk2 Mod 0 Torpedo Decoy
潜艇出于自卫的需要,还会携带一定数量的诱饵,对来袭的鱼雷进行干扰。诱饵会自动在紧急时刻释放,并产生巨大的噪音,来遮盖潜艇的行动。能够成功干扰鱼雷,往往需要一定的运气。因此尽量保证潜艇不要被发现,等到使用诱饵的时候,往往潜艇距离被击沉只有一步之遥了。